شماره پروژه : ۱۶۷
عنوان پروژه : پروژه کنترل دور موتورهای القایی به روش کنترل برداری و شبیه سازی آن
تعداد صفحات : ۱۰۹
شرح مختصر پروژه: در این پروژه که با عنوان کنترل دور موتورهای القایی به روش کنترل برداری و شبیه سازی آن آماده گردیده ، کنترل دور موتورهای القایی با استفاده از کنترل برداری spacevector مورد بررسی قرار می گیرد و این روش با روش های دیگر مقایسه می شود.در ابتدا کنترل برداری در ماشین های القائی مورد بررسی قرار می گیرد و تأثیر جریان استاتور و جریان آرمیچر در این روش توضیح داده می شود که این دو جریان به صورت مستقل از یکدیگر قابل تغییر و کنترل هستند که این دو جریان در روش های کنترل برداری مستقیم و روش کنترل برداری غیر مستقیم کاربرد دارند و سپس روش های کنترل اسکالر توضیح داده می شود و عملکرد ولتاژ متغییر و ماشین های القایی و عملکرد فرکانس متغییر ماشین های القایی مورد بررسی قرار می گیرد.در ادامه فهرست مطالب پروژه کنترل دور موتورهای القایی توضیح داده می شود.
فصل اول پروژه با عنوان ماشین هاى القائى و اصول کنترل بردارى آماده گردیده است که شامل مدل مدارى ماشین هاى القائى ؛ معادلات ولتاژاستاتور و رتور ، مدل ماشین های القائی در دستگاه مرجع دو محوری ، معادلات ولتاژ در دستگاه odq ، معادله گشتاور الکترومغناطیسی درمرجعodq ، معادله مکانیکی ماشین های القائی ، معادلات نهایی ماشین های القائی در مرجع odq ؛ توان های اکتیووراکتیودرمرجع odq ، روش مستقیم و غیر مستقیم کنترل برداری ،حساسیت روش های کنترل برداری به خطای پارامترها و … می باشد.
فصل دوم با عنوان کنترل اسکالر و روش های آن می باشد که شامل : منحنی گشتاور- سرعت ماشین های القائی ، عملکردولتاژمتغییرماشین های القائی ، عملکردفرکانس متغییرماشین های القائی ، کنترل اینورترباتغذیه ولتاژ می باشد.در فصل سوم شبیه سازی کنترل سرعت گرد آوری شده است و شامل روش های کنترل سرعت ، تغییرمقاومت روتور ، روش کنترل ولت برهرتز ، رفتارراه اندازی و بارگذاری موتور القایی ، روش کنترل ولت بر هرتز ثابت با اینورتر ، ، روش های کنترل برداری مستقیم و غیر مستقیم ، تغییرات پله ای گشتاوردرسرعت مرجع ثابت ، تغییرات دوره ای مرجع سرعت و … می باشد.
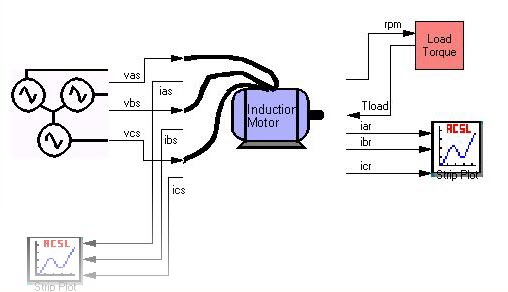
فصل چهارم به شبیه سازی پروژه کنترل دور به روش روش کنترل برداری در matlab می پردازد. که شامل شبیه سازی یک موتوردرایو AC ، ترمزدینامیکی موتور القایی ،کنترل سرعت باجبران لغزش ، کنترل ولت برهرتزحلقه باز ، کنترل مستقیم گشتاور و .. می باشد.
روشهای کنترل اسکالر که شامل تغییر مقاومت روتور ، کنترل ولت بر هرتز ، استفاده از اینورتر شش پله در کارکردهای حلقه باز و حلقه بسته مورد بررسی قرار گرفته و رفتارهای گذرای راه اندازی و بار گذاری محاسبه شده و با فعال کردن فایل های اجرائی نتایج شبیه سازی را مشاهده می کنیم روش مستقیم کنترل برداری بر پایه اندازه گیری شار فاصله هوایی با استفاده از سیم پیچ های جست و جوی جا سازی شده و یا حسگرهای اثر هال ، استوار است در روش کنترل برداری غیر مستقیم در عملکرد های سرعت پایین و همچنین در کنترل موقعیت ، استفاده از حسگرهای شار به دلیل خطای انتگرال گیری مورد استفاده در این حسگر ها نتایج مطلوبی به همراه ندارد . گزینه رایج در این حالت ، کنترل برداری غیر مستقیم است که از اندازه گیر ی مستقیم شار فاصله هوایی استفاده نمی کند در روش کنترل برداری غیر مستقیم با پیاده سازی یک نوع کنترل میدان دوار آشنا شده و قابلیت این کنترل کننده را در ثابت نگهداشتن شار روتور به هنگام تغییرات گشتاور بار مشاهده می کنیم . همچنین به بهبود پاسخ دینامیکی با استفاده از این روش در مقایسه با کنترل اسکالر پی می بریم .
——————-——————-—–—-— ۲۰milkham.com ———-—–———-———-—————
![]() دانلود مستقیم : کنترل دور موتورهای القایی به روش کنترل برداری و شبیه سازی آن
دانلود مستقیم : کنترل دور موتورهای القایی به روش کنترل برداری و شبیه سازی آن
![]() رمز عبور فایل : www.20mikham.com
رمز عبور فایل : www.20mikham.com
![]() حجم فایل : ۴,۸MB
حجم فایل : ۴,۸MB
![]() منبع فایل : ۲۰میخوام
منبع فایل : ۲۰میخوام
——————-——————-—–—-— ۲۰milkham.com ———-—–———-———-—————
- فايل pdf اين پروژه را ميتوانيد از قسمت فوق به صورت کامل و رايگان درياقت نماييد. (کافی است قسمت جلوی دانلود مستقیم روی نام پروژه کلیک کنید)در صورت نياز به فايل word آن را از اين قسمت به صورت آنلاين خريد کنید(برای خرید اینجا کلیک کنید )
- نکات قبل از خريد + دانلود فونت هاي لازمه
- قيمت فايل ورد پروژه : 10000 تومان
- بعد از پرداخت مبلغ (قابل پرداخت با کليه کارتهاي عضو شتاب) لينک دانلود فايل ورد براي شما نشان داده ميشود و ميتوانيد آن را به صورت آني دريافت کنيد.براي خريد ،ايميل خود را به طور صحيح و بدون .www وارد نماييد.(به طور مثال : example@yahoo.com)
